

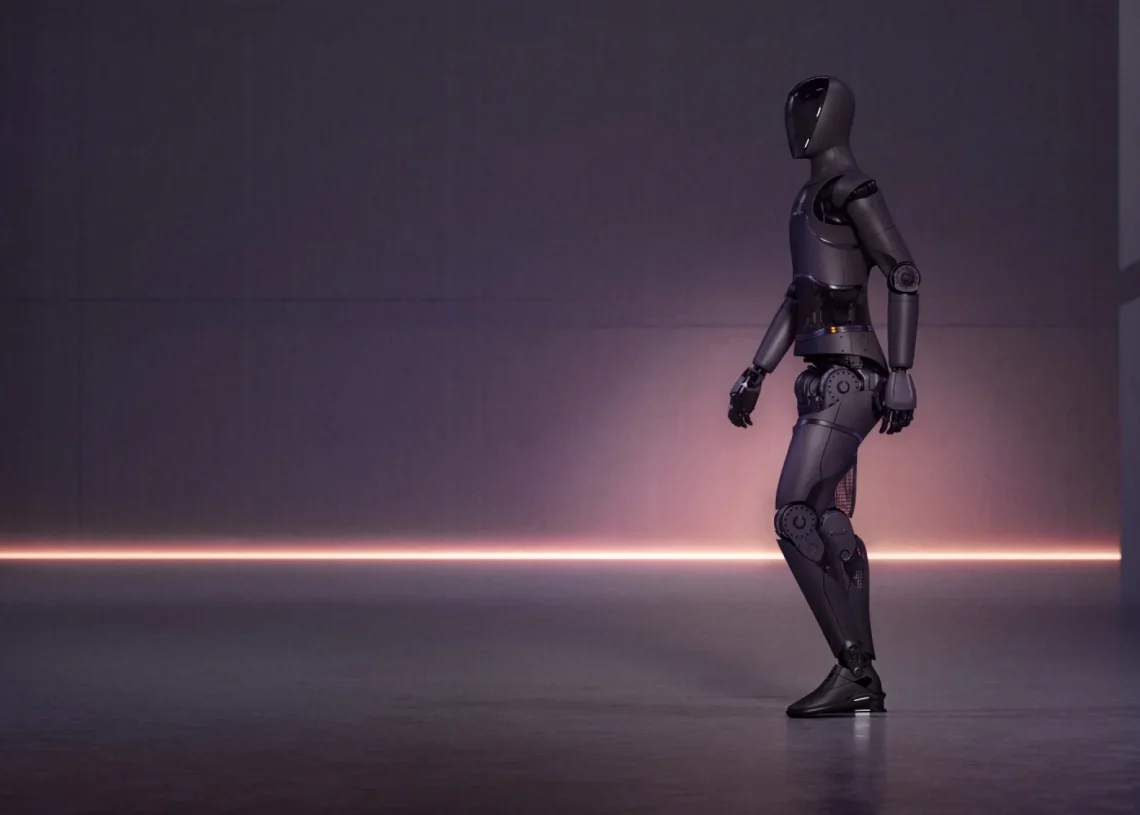
Humanoid robot project develop by Figure 1
A general-purpose humanoid robot manufacturer dubbed Figure, an AI robotics startup, has raised $70 million in its Series A fundraising round.
Fund Raises for commercialization of the Humanoid robot
The new money, according to the business, will be put to use to speed up the creation of Figure 01, the company’s autonomous humanoid robot, expand Figure’s AI data pipeline for autonomous operations, and advance commercialization.
Parkway Venture Capital is the lead investor in the round, with participation from Brett Adcock, Aliya Capital, Bold Capital Partners, Tamarack Global, FJ labs, and Till Reuter, the CEO of Kuka Robotics.
The announcement of the funding follows Figure’s coming out of hiding.
In order to alleviate labour shortages and help the global supply chain, Figure is developing humanoid robots intended for initial deployment into the workforce. Figure has recently made important recruits in the fields of artificial intelligence, controls, manipulation, perception, and commercial operations.
Bob Klunk, the most recent recruit for Figure, joined the group as head of warehouse solutions to aid in the introduction of Figure 01’s first practical application.
Bob, a fulfilment operations veteran with more than 20 years of warehouse expertise, was the former SVP of operations at Geodis.
“We’re focused on investing in companies that are pioneers in AI technology, and we believe that autonomous humanoid robots have the potential to revolutionise the labour economy,” says Jesse Coors-Blankenship, co-founder and managing partner of Parkway Venture Capital.

“We are impressed by the rapid progress that Brett and the team of industry experts at Figure have made in the last year and are thrilled to be a financial partner to provide resources to accelerate the commercialization of Figure 01.”
Brett Adcock, founder and CEO of Figure, says: “Figure’s near-term goal is to deploy humanoids into the workforce, and we believe that the structured, repetitive, and often dangerous tasks in warehouses are a great potential first application.
“This investment round will support the testing of early warehouse solutions and gives us the ability to move and iterate quickly ahead of commercial operations. I look forward to growing this strategic partnership with Parkway and all participating investors to support the success of Figure.”
In the past 12 months, Figure says it has reached “significant milestones”, including:
- Brought on industry leading robotics experts such as Dr Jerry Pratt as Figure’s CTO, who has been involved in humanoid robotics development for over 20 years.
- Scaled an organization of 50 employees with over 100 years of Humanoid and AI experience spanning disciplines of AI, Manipulation, Perception, Robot Controls, Software, Electrical, and Mechanical Engineering.
- Successfully completed the build, integration, and testing of the alpha prototype of Figure 01.
- Defined commercialization efforts for Figure’s first applications in industries where labor shortages are the most severe, such as manufacturing, shipping and logistics, warehousing, and retail.
Humanoid Robots
Professional service robots called humanoids are made to move and interact like people.
They add value by automating processes in a way that boosts productivity and reduces costs, just like all service robots do.
A relatively recent development in professional service robots are humanoid robots. Although long envisioned, they are now beginning to show promise in a variety of applications.
| Join us to get more Automation news |
Use Case of Humanoid Robots
At order to relieve human workers of difficult and risky duties, humanoid robots are utilised at power plants for inspection, maintenance, and emergency response.
They are also ready to perform the normal duties that astronauts perform while in space. Providing companionship for the elderly and sick, serving as a guide and engaging with clients in the capacity of a receptionist, and possibly even serving as a host for the development of human transplant organs are just a few of the many additional different applications.
History of Robots
The history of robots has its origins in the ancient world. Concepts akin to a robot can be found as long ago as the 4th century BC when the Greek mathematician Archytas of Tarentum postulated a mechanical bird he called “The Pigeon” propelled by steam.
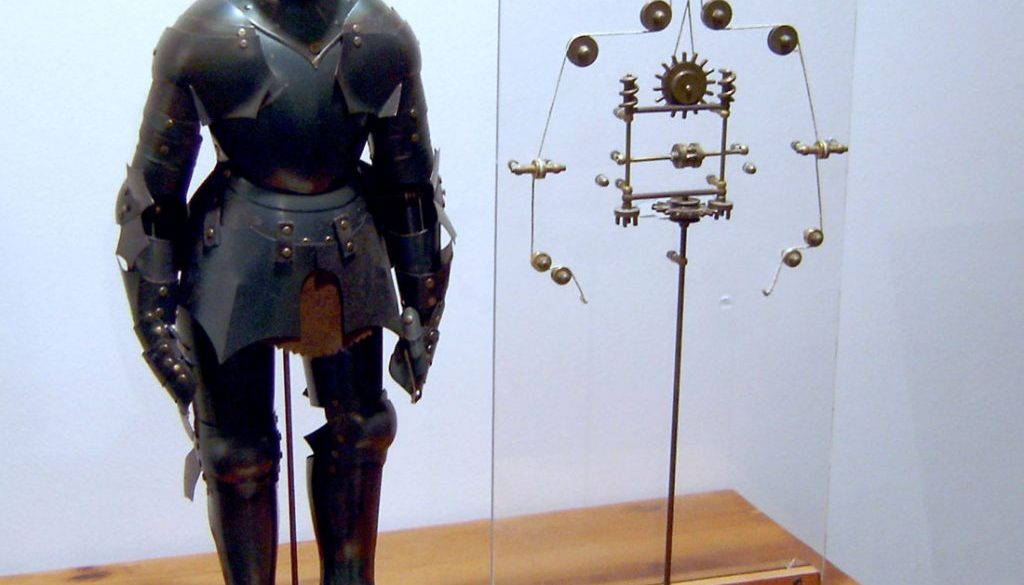
Leonardo da Vinci made one of the first recorded designs of a humanoid robot (1452–1519) in around 1495.
Leonardo’s notebooks, rediscovered in the 1950s, contain detailed drawings of a mechanical knight in armour who could sit up, wave their arms and move their head and jaw.
Around 1700, many automata were built, some of which could act, draw, fly, or play music; some of the most famous works of the period were created by Jacques de Vaucanson in 1737, including an automaton flute player, a tambourine player, and his most famous work, “The Digesting Duck“. Vaucanson’s duck was powered by weights and could imitate a real duck by flapping its wings (there were over 400 parts in each of the wings alone), eating grain, digesting it, and defecating by excreting matter stored in a hidden compartment.
The Japanese craftsman Hisashige Tanaka, known as “Japan’s Edison”, created an array of incredibly complex mechanical toys, some of which could serve tea, fire arrows drawn from a quiver, or even paint a Japanese kanji character.
The first humanoid robot was a soldier with a trumpet, made in 1810 by Friedrich Kaufmann in Dresden, Germany.
The robot was on display until at least April 30, 1950.
In 1928, one of the first humanoid robots was exhibited at the Model Engineers Society annual exhibition in London. Invented by W. H. Richards, the robot – named Eric – consisted of an aluminium suit of armour with eleven electromagnets and one motor powered by a 12-volt power source.
The robot could move its hands and head and could be controlled by remote control or voice control.
In 1939, the humanoid robot known as Elektro appeared at the World’s Fair. It was 2.1 m tall, weighing 120 kg; it could walk by voice command, speak about 700 words (using a 78-rpm record player), smoke cigarettes, blow up balloons, and move its head and arms.
The body consisted of a steel gear cam and motor skeleton covered by an aluminium skin.
The first electronic autonomous robots with complex behaviour were created by William Grey Walter of the Burden Neurological Institute in Bristol, England, in 1948 and 1949.
The first digitally operated and programmable robot was invented by George Devol in 1954 and was ultimately called the Unimate.
This later laid the foundations of the modern robotics industry. Devol sold the first Unimate to General Motors in 1960, and it was installed in 1961 in a plant in Trenton, New Jersey, to lift hot pieces of metal from a die-casting machine and stack them. Devol’s patent for the first digitally operated programmable robotic arm represents the foundation of the modern robotics industry.
In 1969 Mechanical Engineering student Victor Scheinman created the Stanford Arm, recognised as the first electronic computer-controlled robotic arm.
The first mobile robot capable of reasoning about its surroundings, Shakey, was built in 1970 by the Stanford Research Institute.
To navigate, Shakey combined multiple sensor inputs, including TV cameras, laser rangefinders, and bump sensors.
The biomimetic robot RoboTuna was built by doctoral student David Barrett at the Massachusetts Institute of Technology in 1996 to study how fish swim in the water. RoboTuna is designed to float and to resemble a bluefin tuna.
In 1999, Sony introduced the AIBO, a robotic dog capable of interacting with humans; the first models released in Japan sold out in 20 minutes.
Honda revealed the most advanced result of its humanoid project in 2000, named ASIMO.
ASIMO can run, walk, communicate with humans, recognise faces, environment, voices and posture, and interact with its environment.
The popular Roomba, a robotic vacuum cleaner, was first released in 2002 by the company iRobot.
On October 25, 2017, at the Future Investment Summit in Riyadh, a robot called Sophia was granted Saudi Arabian citizenship, becoming the first robot ever to have a nationality.
The following is a detailed timeline of the history of AI:

4th century BC.
-
Aristotle invented syllogistic logic, the first formal deductive reasoning system.
13th century
-
Talking heads were said to have been created, Roger Bacon and Albert the Great reputedly among the owners.
-
Ramon Lull, the Spanish theologian, invented machines for discovering nonmathematical truths through combinatorics.
-
In 1206 A.D., Al-Jazari, an Arab inventor, designed what is believed to be the first programmable humanoid robot, a boat carrying four mechanical musicians powered by water flow.
15th century
-
The invention of printing using moveable type. Gutenberg Bible printed (1456).
15th-16th century
-
Clocks, the first modern measuring machines, were first produced using lathes.
16th century
-
Clockmakers extended their craft to creating mechanical animals and other novelties. For example, see DaVinci’s walking lion (1515).
-
Rabbi Loew of Prague is said to have invented the Golem, a clay man brought to life (1580).
17th century
-
Early in the century, Descartes proposed that the bodies of animals are nothing more than complex machines. Many other 17th-century thinkers offered variations and elaborations of the Cartesian mechanism.
-
Pascal created the first mechanical digital calculating machine (1642).
-
Thomas Hobbes published The Leviathan (1651), containing a mechanistic and combinatorial theory of thinking.
-
Arithmetical machines devised by Sir Samuel Morland between 1662 and 1666
-
Leibniz improved Pascal’s machine to do multiplication & division with a device called the Step Reckoner (1673) and envisioned a universal calculus of reasoning by which arguments could be decided mechanically.
18th century
-
The 18th century saw a profusion of mechanical toys, including the celebrated mechanical duck of Vaucanson and von Kempelen’s phony mechanical chess player, The Turk (1769). Edgar Allen Poe wrote (in the Southern Literary Messenger, April 1836) that the Turk could not be a machine because, if it were, it would not lose.
19th century
-
Joseph-Marie Jacquard invented the Jacquard loom, the first programmable machine, with instructions on punched cards (1801).
-
Luddites (by Marjie Bloy, PhD. Victorian Web) (led by Ned Ludd) destroyed machinery in England (1811-1816). See also What the Luddites Really Fought Against by Richard Conniff, Smithsonian magazine (March 2011).
-
Mary Shelley published the story of Frankenstein’s monster (1818). The book Frankenstein, or the Modern Prometheus available from Project Gutenberg.
-
Charles Babbage & Ada Byron (Lady Lovelace) designed a programmable mechanical calculating machine, the Analytical Engine (1832). A working model was built in 2002; a short video shows it working.
-
George Boole developed a binary algebra representing (some) “laws of thought,” published in The Laws of Thought (1854).
-
Modern propositional logic was developed by Gottlob Frege in his 1879 work Begriffsschrift and later clarified and expanded by Russell, Tarski, Godel, Church and others.
20th century – First Half
-
Bertrand Russell and Alfred North Whitehead published Principia Mathematica, revolutionising formal logic. Russell, Ludwig Wittgenstein, and Rudolf Carnap lead philosophy into the logical analysis of knowledge.
-
Torres y Quevedo built his chess machine ‘Ajedrecista’, using electromagnets under the board to play the endgame rook and king against the lone king, possibly the first computer game (1912).
-
Karel Capek’s play “RUR” (Rossum’s Universal Robots) was produced in 1921 (London opening, 1923). – First use of the word ‘robot’ in English.
-
Alan Turing proposed the universal Turing machine (1936-37)
-
Electro, a mechanical man, was introduced by Westinghouse Electrical at the World’s Fair in New York (1939), along with Sparko, a mechanical dog.
-
Warren McCulloch & Walter Pitts publish “A Logical Calculus of the Ideas Immanent in Nervous Activity” (1943), laying the foundations for neural networks.
-
Arturo Rosenblueth, Norbert Wiener & Julian Bigelow coin the term “cybernetics” in a 1943 paper. Wiener’s popular book by that name was published in 1948.
-
Emil Post proves that production systems are a general computational mechanism (1943). See Ch.2 of Rule-Based Expert Systems for the uses of production systems in AI. Post also did important work on the completeness, inconsistency, and proof theory.
-
George Polya published his best-selling book on thinking heuristically, How to Solve It, in 1945. This book introduced the term ‘heuristic’ into modern thinking and has influenced many AI scientists.
-
Vannevar Bush published As We May Think (Atlantic Monthly, July 1945), a prescient vision of the future in which computers assist humans in many activities.
-
Grey Walter experimented with autonomous robots, turtles named Elsie and Elmer, at Bristol (1948-49) based on the premise that a small number of brain cells could give rise to complex behaviours.
-
A.M. Turing published “Computing Machinery and Intelligence” (1950). – Introduction of the Turing Test to operationalise a test of intelligent behaviour. See The Turing Institute for more on Turing.
-
Claude Shannon published a detailed analysis of chess playing as a search in “Programming a computer to play chess” (1950).
-
Isaac Asimov published his three laws of robotics (1950).
The modern history of AI begins with the development of stored-program electronic computers. For a short summary, see Genius and Tragedy at Dawn of Computer Age By ALICE RAWSTHORN, NY Times (March 25, 2012 ), a review of technology historian George Dyson’s book “Turing’s Cathedral: The Origins of the Digital Universe.”
1956
-
John McCarthy coined the term “artificial intelligence” as the topic of the Dartmouth Conference, the first conference devoted to the subject.
-
Demonstration of the first running AI program, the Logic Theorist (LT), written by Allen Newell, J.C. Shaw and Herbert Simon (Carnegie Institute of Technology, now Carnegie Mellon University). See Over the holidays 50 years ago; two scientists hatched artificial intelligence.
1957
-
The General Problem Solver (GPS) demonstrated by Newell, Shaw & Simon.
1952-62
-
Arthur Samuel (IBM) wrote the first game-playing program for checkers to achieve sufficient skill to challenge a world champion. Samuel’s machine learning programs were responsible for the high performance of the checkers player.
1958
-
John McCarthy (MIT) invented the Lisp language.
-
Herb Gelernter & Nathan Rochester (IBM) described a theorem prover in geometry that exploits a semantic model of the domain in the form of diagrams of “typical” cases.
-
Teddington Conference on the Mechanisation of Thought Processes was held in the UK, and among the papers presented were John McCarthy’s Programs with Common Sense,” Oliver Selfridge’s “Pandemonium,” and Marvin Minsky’s “Some Methods of Heuristic Programming and Artificial Intelligence.”
Late 50’s & Early 60’s
-
Margaret Masterman & colleagues at Cambridge design semantic nets for machine translation. See Themes in the work of Margaret Masterman by Yorick Wilks (1988).
1961
-
James Slagle (PhD dissertation, MIT) wrote (in Lisp) the first symbolic integration program, SAINT, which solved calculus problems at the college freshman level.
1962
-
The first industrial robot company, Unimation, was founded.
1963
-
Thomas Evans’ program, ANALOGY, written as part of his PhD work at MIT, demonstrated that computers could solve the same analogy problems as are given on IQ tests.
-
Ivan Sutherland’s MIT dissertation on Sketchpad introduced the idea of interactive graphics into computing.
-
Edward A. Feigenbaum & Julian Feldman published Computers and Thought, the first collection of articles about artificial intelligence.
1964
-
Danny Bobrow’s dissertation at MIT (tech. report #1 from MIT’s AI group, Project MAC) shows that computers can understand natural language well enough to solve algebra word problems correctly.
-
Bert Raphael’s MIT dissertation on the SIR program demonstrates the power of a logical representation of knowledge for question-answering systems
1965
-
J. Alan Robinson invented a mechanical proof procedure, the Resolution Method, which allowed programs to work efficiently with formal logic as a representation language. (See Carl Hewitt’s downloadable PDF file Middle History of Logic Programming).
-
Joseph Weizenbaum (MIT) built ELIZA, an interactive program that discusses any topic in English. It was a popular toy at AI centres on the ARPA-net when a version that “simulated” the dialogue of a psychotherapist was programmed.
1966
-
Ross Quillian (PhD dissertation, Carnegie Inst. of Technology; now CMU) demonstrated semantic nets.
-
First Machine Intelligence workshop at Edinburgh – the first of an influential annual series organised by Donald Michie and others.
-
Negative report on machine translation has killed much work in Natural Language Processing (NLP) for many years.
1967
-
Dendral program (Edward Feigenbaum, Joshua Lederberg, Bruce Buchanan, Georgia Sutherland at Stanford) demonstrated to interpret mass spectra on organic chemical compounds. First successful knowledge-based program for scientific reasoning.
-
Joel Moses (PhD work at MIT) demonstrated the power of symbolic reasoning for integration problems in the Macsyma (PDF file) program. First successful knowledge-based program in mathematics.
-
Richard Greenblatt at MIT built a knowledge-based chess-playing program, MacHack, that was good enough to achieve a class-C rating in tournament play.
The Late 60s
-
Doug Engelbart invented the mouse at SRI.
1968
-
Marvin Minsky & Seymour Papert publish Perceptrons, demonstrating the limits of simple neural nets.
1969
-
SRI robot, Shakey, demonstrated combining locomotion, perception and problem-solving.
-
Roger Schank (Stanford) defined the conceptual dependency model for natural language understanding. Later developed (in PhD dissertations at Yale) for use in story understanding by Robert Wilensky and Wendy Lehnert and for use in understanding memory by Janet Kolodner.
-
First International Joint Conference on Artificial Intelligence (IJCAI) was held in Washington, DC.
1970
-
Jaime Carbonell (Sr.) developed SCHOLAR, an interactive program for computer-aided instruction based on semantic nets to represent knowledge.
-
Bill Woods described Augmented Transition Networks (ATNs) as a representation of natural language understanding.
-
Patrick Winston’s PhD program, ARCH, at MIT, learned concepts from examples in the world of children’s blocks.
Early 70’s
-
Jane Robinson & Don Walker established an influential Natural Language Processing group at SRI.
1971
-
Terry Winograd’s PhD thesis (MIT) demonstrated the ability of computers to understand English sentences in a restricted world of children’s blocks, in a coupling of his language understanding program, SHRDLU, with a robot arm that carried out instructions typed in English.
1972
-
Prolog developed by Alain Colmerauer.
1973
-
The Assembly Robotics group at Edinburgh University builds Freddy, the Famous Scottish Robot capable of using vision to locate and assemble models.
1974
-
Ted Shortliffe’s PhD dissertation on MYCIN (Stanford) demonstrated the power of rule-based systems for knowledge representation and inference in the domain of medical diagnosis and therapy. Sometimes called the first expert system.
-
Earl Sacerdoti developed one of the first planning programs, ABSTRIPS, and developed techniques of hierarchical planning.
1975
-
Marvin Minsky published his widely-read and influential article on Frames as a representation of knowledge, in which many ideas about schemas and semantic links are brought together.
-
The Meta-Dendral learning program produced new results in chemistry (some rules of mass spectrometry), the first scientific discoveries by a computer to be published in a refereed journal.
Mid 70’s
-
Barbara Grosz (SRI) established limits to traditional AI approaches to discourse modelling. Subsequent work by Grosz, Bonnie Webber and Candace Sidner developed the notion of “centering”, used in establishing the focus of discourse and anaphoric references in NLP.
-
Alan Kay and Adele Goldberg (Xerox PARC) developed the Smalltalk language, establishing the power of object-oriented programming and of icon-oriented interfaces.
-
David Marr and MIT colleagues describe the “primal sketch” and its role in visual perception.
1976
-
Doug Lenat’s AM program (Stanford PhD dissertation) demonstrated the discovery model (loosely-guided search for interesting conjectures).
-
Randall Davis demonstrated the power of meta-level reasoning in his PhD dissertation at Stanford.
Late 70’s
-
Stanford’s SUMEX-AIM resource, headed by Ed Feigenbaum and Joshua Lederberg, demonstrates the power of the ARPAnet for scientific collaboration.
1978
-
Tom Mitchell, at Stanford, invented the concept of Version Spaces to describe the search space of a concept formation program.
-
Herb Simon won the Nobel Prize in Economics for his theory of bounded rationality, one of the cornerstones of AI known as “satisficing”.
-
The MOLGEN program, written at Stanford by Mark Stefik and Peter Friedland, demonstrated that an object-oriented representation of knowledge could be used to plan gene-cloning experiments.
1979
-
Mycin program, initially written as Ted Shortliffe’s PhD dissertation at Stanford, was demonstrated to perform at the level of experts. Bill VanMelle’s PhD dissertation at Stanford demonstrated the generality of MYCIN’s representation of knowledge and style of reasoning in his EMYCIN program, the model for many commercial expert system “shells”.
-
Jack Myers and Harry Pople at the University of Pittsburgh developed INTERNIST, a knowledge-based medical diagnosis program based on Dr Myers’ clinical knowledge.
-
Cordell Green, David Barstow, Elaine Kant and others at Stanford demonstrated the CHI system for automatic programming.
-
The Stanford Cart, built by Hans Moravec, becomes the first computer-controlled, autonomous vehicle when it successfully traverses a chair-filled room and circumnavigates the Stanford AI Lab.
-
Drew McDermott & Jon Doyle at MIT and John McCarthy at Stanford begin publishing work on non-monotonic logic and formal aspects of truth maintenance.
1980’s
-
Lisp Machines were developed and marketed.
-
First, expert system shells and commercial applications.
1980
-
Lee Erman, Rick Hayes-Roth, Victor Lesser and Raj Reddy published the first description of the blackboard model as the framework for the HEARSAY-II speech understanding system.
-
The First National Conference of the American Association of Artificial Intelligence (AAAI) was held at Stanford.
1981
-
Danny Hillis designs the connection machine, a massively parallel architecture that brings new power to AI and to computation in general. (Later founds Thinking Machines, Inc.)
1983
-
John Laird & Paul Rosenbloom, working with Allen Newell, complete CMU dissertations on SOAR.
-
James Allen invented the Interval Calculus, the first widely used formalisation of temporal events.
Mid 80’s
-
Neural Networks became widely used with the Backpropagation algorithm (first described by Werbos in 1974).
1985
-
The autonomous drawing program, Aaron, created by Harold Cohen, is demonstrated at the AAAI National Conference (based on more than a decade of work and with subsequent work showing major developments).
1987
-
Marvin Minsky publishes The Society of Mind, a theoretical description of the mind as a collection of cooperating agents.
1989
-
Dean Pomerleau at CMU created ALVINN (An Autonomous Land Vehicle in a Neural Network), which grew into the system that drove a car coast-to-coast under computer control for all but about 50 of the 2850 miles.
1990’s
-
Major advances in all areas of AI, with significant demonstrations in machine learning, intelligent tutoring, case-based reasoning, multi-agent planning, scheduling, uncertain reasoning, data mining, natural language understanding and translation, vision, virtual reality, games, and other topics.
-
With numerous collaborators, Rod Brooks’ COG Project at MIT makes significant progress in building a humanoid robot.
-
TD-Gammon, a backgammon program written by Gerry Tesauro, demonstrates that reinforcement learning is powerful enough to create a championship-level game-playing program by competing favourably with world-class players.
-
EQP theorem prover at Argonne National Labs proves the Robbins Conjecture in mathematics (October-November, 1996).
-
The Deep Blue chess program beats the current world chess champion, Garry Kasparov, in a widely followed match and rematch (See Deep Blue Wins). (May 11, 1997).
-
NASA’s pathfinder mission made a successful landing, and the first autonomous robotics system, Sojourner, was deployed on the surface of Mars. (July 4, 1997)
-
The first official Robo-Cup soccer match (1997) featured table-top matches with 40 teams of interacting robots and over 5000 spectators.
-
Web crawlers and other AI-based information extraction programs have become essential in the widespread use of the world-wide-web.
-
Demonstration of an Intelligent Room and Emotional Agents at MIT’s AI Lab. Initiation of work on the Oxygen Architecture, which connects mobile and stationary computers in an adaptive network.
2000’s
-
Interactive robot pets (a.k.a. “smart toys”) became commercially available, realising the vision of the 18th can—novelty toy makers.
-
Cynthia Breazeal at MIT publishes her dissertation on Sociable Machines, describing KISMET, a robot with a face that expresses emotions.
-
Stanford’s autonomous vehicle, Stanley, wins the DARPA Grand Challenge race. (October 2005). (See In a Grueling Desert Race, a Winner, but Not a Driver.
-
The Nomad robot explores remote regions of Antarctica, looking for meteorite samples.











{kind=link}